コンポーネント詳細¶
搭載コンポーネントごとの接続情報と公式資料へのリンクをまとめています。コードを書く際の参照先として使ってください。
GPIO ピンアサイン一覧(クイックリファレンス)¶
GPIO |
物理ピン |
Net 名 |
接続先 |
機能 |
|---|---|---|---|---|
GP0 |
1 |
D0 |
OV7675 |
カメラ データバス bit 0 |
GP1 |
2 |
D1 |
OV7675 |
カメラ データバス bit 1 |
GP2 |
4 |
D2 |
OV7675 |
カメラ データバス bit 2 |
GP3 |
5 |
D3 |
OV7675 |
カメラ データバス bit 3 |
GP4 |
6 |
D4 |
OV7675 |
カメラ データバス bit 4 |
GP5 |
7 |
D5 |
OV7675 |
カメラ データバス bit 5 |
GP6 |
9 |
D6 |
OV7675 |
カメラ データバス bit 6 |
GP7 |
10 |
D7 |
OV7675 |
カメラ データバス bit 7 |
GP8 |
11 |
— |
未接続 |
— |
GP9 |
12 |
— |
未接続 |
— |
GP10 |
14 |
— |
未接続 |
— |
GP11 |
15 |
PWM |
FS90R |
PWM 出力(連続回転サーボ) |
GP12 |
16 |
TX |
拡張基板マイコン |
UART0 TX |
GP13 |
17 |
RX |
拡張基板マイコン |
UART0 RX |
GP14 |
19 |
CAM_SDA |
OV7675 |
I2C1 SDA(SCCB) |
GP15 |
20 |
CAM_SCL |
OV7675 |
I2C1 SCL(SCCB) |
GP16 |
21 |
SPI_MISO |
MCP3008 |
SPI0 MISO |
GP17 |
22 |
SPI_CS |
MCP3008 |
SPI0 チップセレクト |
GP18 |
24 |
SPI_CLK |
MCP3008 |
SPI0 クロック |
GP19 |
25 |
SPI_MOSI |
MCP3008 |
SPI0 MOSI |
GP20 |
26 |
IMU_SDA |
ICM-42688 |
I2C0 SDA |
GP21 |
27 |
IMU_SCL |
ICM-42688 |
I2C0 SCL |
GP22 |
29 |
PCLK |
OV7675 |
カメラ ピクセルクロック入力 |
GP26 |
31 |
HS |
OV7675 |
カメラ HSYNC 入力 |
GP27 |
32 |
VS |
OV7675 |
カメラ VSYNC 入力 |
GP28 |
34 |
XCLK_PICO |
OV7675 |
カメラ マスタークロック出力 |
各コンポーネント¶
Raspberry Pi Pico W(OBC)¶
フライトソフトウェアを実行するメインマイコンボードです。Pico W には Wi-Fi が内蔵されており、地上局との通信に使用します。
公式資料 |
リンク |
|---|---|
データシート |
|
Getting Started ガイド |
|
SDK リファレンス |
ICM-42688(IMU)¶
6 軸 IMU(3 軸加速度計 + 3 軸ジャイロスコープ)です。衛星の角速度・加速度を計測し、姿勢推定に使用します。
項目 |
値 |
|---|---|
メーカー |
TDK InvenSense |
インターフェース |
I2C0 |
SDA |
GP20 |
SCL |
GP21 |
公式資料 |
リンク |
|---|---|
販売ページ |
|
データシート |
MCP3008(ADC)¶
8 チャンネル 10bit SPI ADC です。フォトダイオード 4 本のアナログ電圧値をデジタル変換して Pico W に渡します。
項目 |
値 |
|---|---|
メーカー |
Microchip Technology |
インターフェース |
SPI0 |
MISO |
GP16 |
CS |
GP17 |
CLK |
GP18 |
MOSI |
GP19 |
チャンネル割り当て¶
MAIN 基板回路図から導出したチャンネルと信号の対応です。
CH |
ネット名 |
用途 |
|---|---|---|
CH1 |
VBAT_SENSE |
電池電圧モニタ |
CH2 |
REF |
参照電圧 |
CH3 |
PD4 |
フォトダイオード D4(TOP 基板 右上) |
CH4 |
PD3 |
フォトダイオード D3(TOP 基板 左上) |
CH5 |
PD2 |
フォトダイオード D2(TOP 基板 左下) |
CH6 |
PD1 |
フォトダイオード D1(TOP 基板 右下) |
公式資料 |
リンク |
|---|---|
データシート |
|
製品ページ |
S9066-211SB(フォトダイオード・太陽センサ)¶
浜松ホトニクス製フォトダイオードです。TOP 基板の四隅に外向きに配置され、ADC 経由でアナログ光量値として読み取ります。
TOP 基板上の配置¶
TOP 基板の F.Cu 面(表面)を正面から見たときの配置です。
PCB 上の位置 |
部品番号 |
ネット名 |
ADC CH |
|---|---|---|---|
左上 (x=57, y=57) |
D3 |
PD3 |
CH4 |
右上 (x=103, y=57) |
D4 |
PD4 |
CH3 |
左下 (x=57, y=103) |
D2 |
PD2 |
CH5 |
右下 (x=103, y=103) |
D1 |
PD1 |
CH6 |
衛星フレームにおける実際の向き(前後左右)は機体の組み立て方向に依存します。TOP 基板の実装図(ハードウェア資料 参照)を合わせて確認してください。
項目 |
値 |
|---|---|
メーカー |
浜松ホトニクス(Hamamatsu Photonics) |
インターフェース |
アナログ電圧出力 |
個数 |
4 |
公式資料 |
リンク |
|---|---|
データシート |
OV7675(カメラモジュール)¶
OmniVision 製 CMOS イメージセンサです。
項目 |
値 |
|---|---|
メーカー |
OmniVision Technologies |
インターフェース(データ) |
8bit パラレル |
インターフェース(設定) |
I2C1(SCCB) |
データバス・同期信号¶
信号 |
GPIO |
|---|---|
D0–D7 |
GP0–GP7 |
PCLK |
GP22 |
HSYNC |
GP26 |
VSYNC |
GP27 |
XCLK |
GP28 |
SCCB(レジスタ設定)¶
項目 |
値 |
|---|---|
インターフェース |
I2C1 |
SDA |
GP14 |
SCL |
GP15 |
公式資料 |
リンク |
|---|---|
販売ページ |
|
モジュールデータシート |
|
チップデータシート |
FS90R(連続回転サーボ・リアクションホイール)¶
Feetech 製の連続回転(ローテーション)サーボです。通常の角度制御サーボとは異なり、PWM のデューティ比で回転方向と速度を制御します。シャフトにリアクションホイール(ハンドスピナー)を取り付け、姿勢制御に使用します。
項目 |
値 |
|---|---|
メーカー |
Feetech(飞特模型) |
インターフェース |
PWM |
GPIO |
GP11 |
電源電圧 |
4.8–6.0 V(電池から直接供給) |
公式資料 |
リンク |
|---|---|
データシート |
電源回路(LDO・保護ダイオード)¶
模擬衛星全体の電源系統を管理する回路部です。バッテリーからの不安定な電圧を安定化し、マイコンやセンサ類を安全に動作させる仕組みを備えています。
項目 |
値 |
|---|---|
LDO レギュレータ |
TA48M05F (東芝製) |
入力電圧範囲 |
4.4 V 〜 6.4 V (単4電池 4本直列) |
出力電圧 |
5.0 V |
逆流防止ダイオード |
1S4 (ショットキーバリアダイオード) |
バッテリー電圧監視分圧比 |
1/2 (22 kΩ + 22 kΩ) |
接続先 ADC チャンネル |
MCP3008 CH1 (VBAT_SENSE) |
システム構成と画像解説¶
1. LDO レギュレータ周辺回路¶
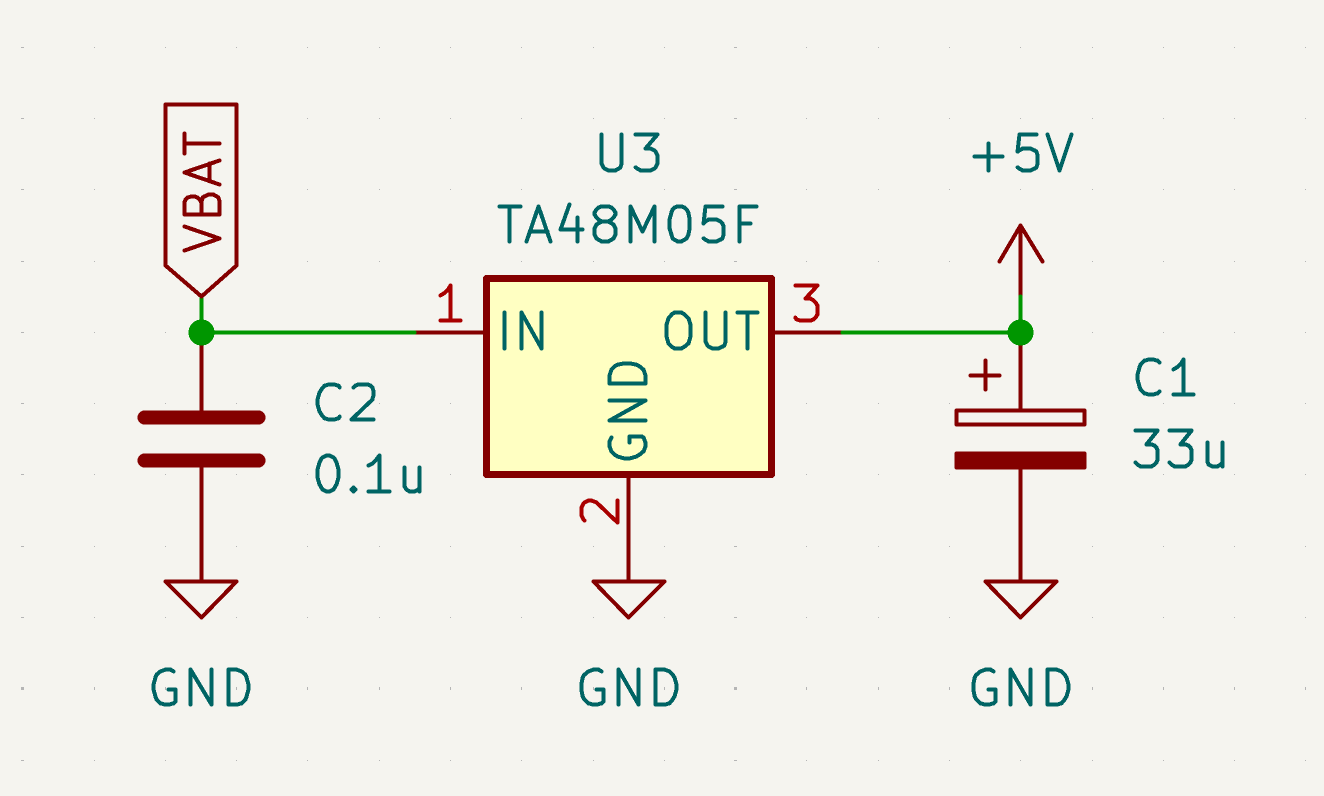
入力電源 (Bat1): 単4型電池(ニッケル水素充電池またはアルカリ乾電池)4本直列(4.4V 〜 6.4V)を入力とします。
サーボモータ (Servo1) への直接供給: サーボモータは突入電流やストール電流(最大約 120mA 以上)が非常に大きくノイズの発生源となるため、LDO レギュレータを介さずバッテリー電圧(
VBAT)から直接給電します。これにより、サーボモータの動作による電圧降下やノイズが、敏感なセンサ類やマイコンに伝わるのを防ぎ、ブラウンアウトリセット(電圧低下による意図しない再起動)を防止します。低ドロップアウト・リニアレギュレータ (U3: TA48M05F): バッテリーの変動する電圧から安定した
+5Vを生成します。東芝製のTA48M05F(最大出力 500mA、ドロップアウト電圧約 0.65V)を使用しており、入力電圧が 5V 近くまで低下しても安定して動作可能です。平滑コンデンサ (C1, C2): レギュレータの入力側(
VBAT)にノイズ低減用のバイパスコンデンサC2(0.1µF) を、出力側(+5V)には電圧変動を抑えるための大容量平滑用電解コンデンサC1(47µF) を配置しています。バッテリー電圧モニタ (VBAT_SENSE): バッテリーの残量をマイコンで監視するため、
VBATの電圧をR5(22kΩ) とR6(22kΩ) の分圧抵抗で 1/2 に減圧し、ADC(MCP3008)の CH1(VBAT_SENSE)に入力します。これにより、最大電圧 6.4V 時でも 3.2V に減圧され、ADC で安全に電圧を読み取ることが可能になります。
2. Raspberry Pi Pico W 電源注入と逆流防止¶
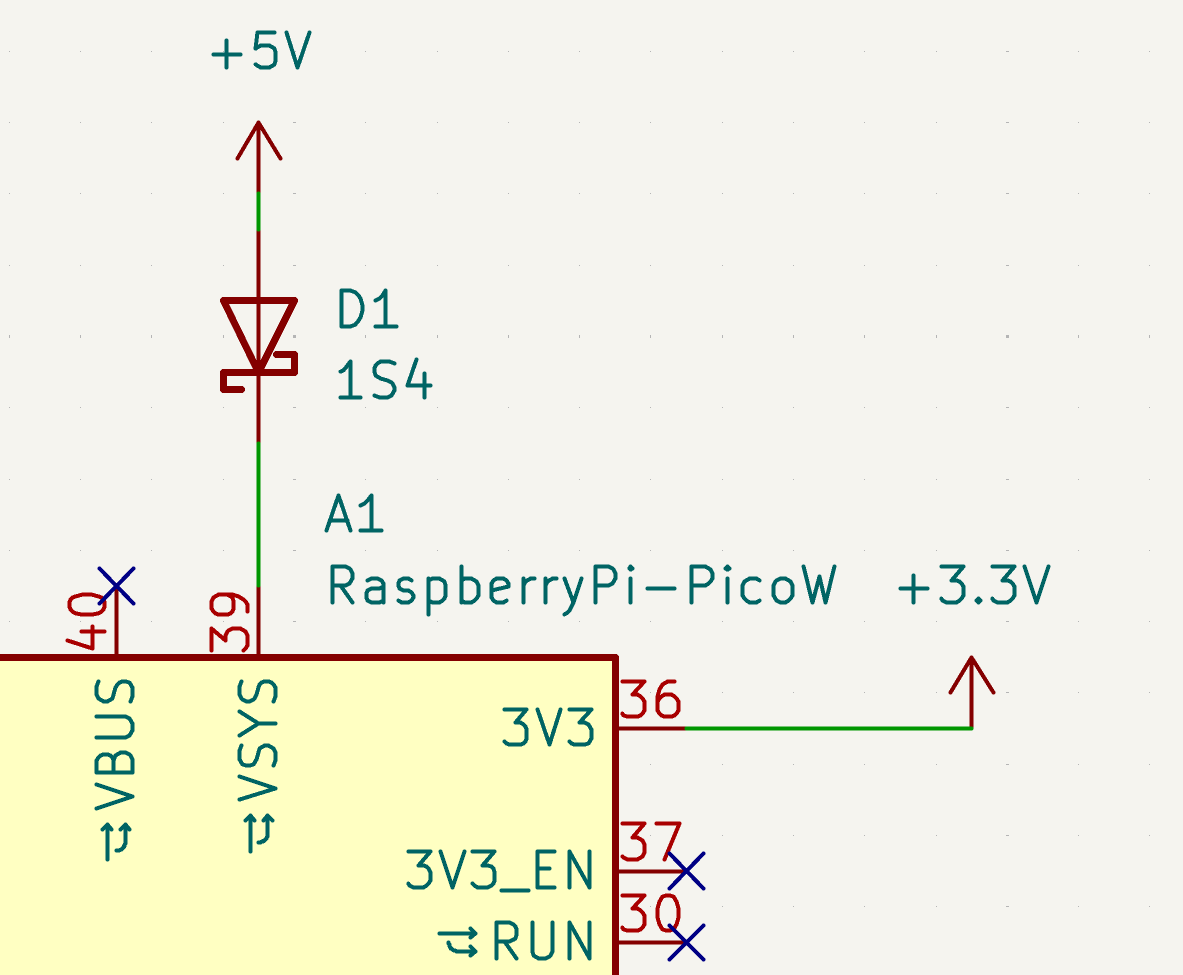
Raspberry Pi Pico W の電源設計(データシート「4.5. Powering Pico」準拠)において、重要な電源ピンである VSYS と VBUS の違いと連携について解説します。
VBUS(Pin 40): USB コネクタからの 5V 電源入力ピンです。USB ケーブルから給電されている場合のみ電圧(約5V)が発生します。
VSYS(Pin 39): ボード全体のシステム主電源入力ピンです。許容入力範囲は 1.8V 〜 5.5V で、Pico 内部の降圧・昇圧 DC-DC コンバータ(RT6150等)に直結されており、ここからシステム用の 3.3V が生成されます。
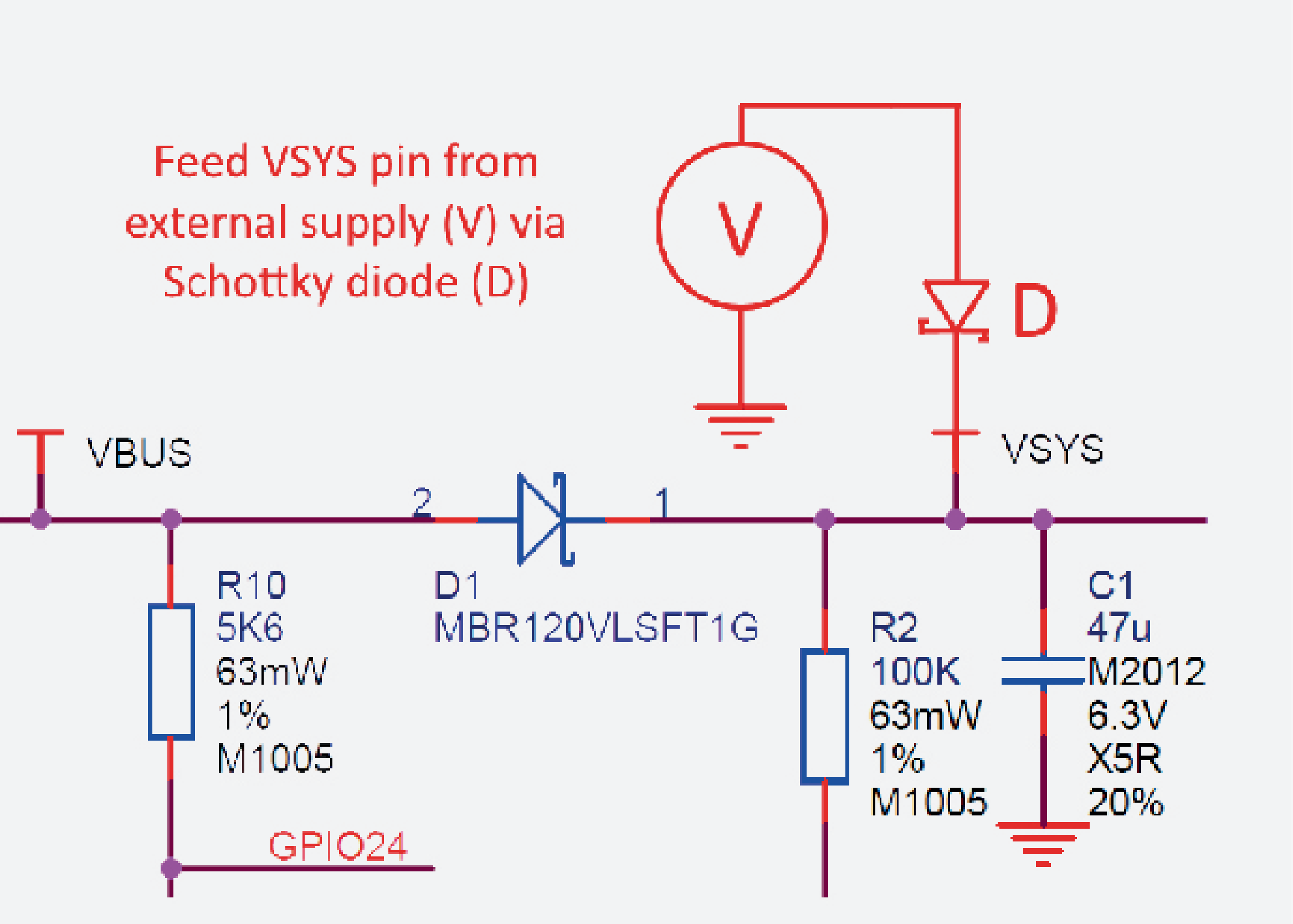
データシートの「4.5. Powering Pico」に基づき、メイン基板では以下のように協調動作させています。
逆流防止ダイオード (D1: 1S4): 5V レギュレータの出力
+5Vから Pico W のVSYSピン(Pin 39)に電力を注入するラインに、ショットキーバリアダイオードD1(1S4/1N5711) を直列に挿入しています。役割: 開発時に Pico W の USB ポートに PC から USB ケーブルを接続すると、PC から供給される USB 5V (
VBUS) が、Pico 内蔵のショットキーダイオード(MBR120VLSFT1G)を介してVSYSに現れます。もし外部ダイオードD1が存在しないと、USB から供給された電力がメイン基板の+5Vラインに逆流(回り込み)し、LDO レギュレータ(U3)や周辺の電子部品を破壊する恐れがあります。D1はアノードを+5V側、カソードをVSYS側に向けることで、この逆流を確実に防いでいます。動作(ダイオードOR): バッテリー駆動時は
D1を経由してVSYSに約 4.6V 〜 4.8V(順方向電圧降下分だけ低下)が供給され、Pico W は問題なく動作します。USB 接続時はVSYSが USB 電圧(VBUS)近くまで上昇するためD1が逆バイアス(遮断)され、メイン基板側への回り込みを完全に防止します(データシートに記載されたダイオードOR回路と同等の設計)。
各センサ用 3.3V の供給:
VSYSに入力された電力は、Pico W のオンボード降圧・昇圧 DC-DC コンバータによって+3.3Vに変換され、3V3ピン(Pin 36)から出力されます。この+3.3V電源ラインを用いて、カメラ(OV7675)、ADC(MCP3008)、IMU(ICM-42688)など、サーボを除くすべての制御系デバイスを駆動します。
UART0(デバッグポート)¶
メイン基板のデバッグ用に使用します。
項目 |
値 |
|---|---|
インターフェース |
UART0 |
TX |
GP12 |
RX |
GP13 |